|
Nachdem
ich mich von der ersten Investition in Rumpf und Mechanik mit Motor
erholt habe, konnte ich jetzt die nächste größere Anschaffung
tätigen. Man(n) soll es kaum glauben, aber für das RC-Equipment hätte
ich auch noch mal den Rumpf mit Mechanik bekommen.
Mehr
zu den einzelnen RC-Komponenten im Folgenden.
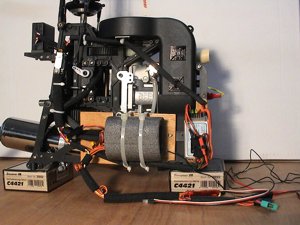
Auf
dem Bild rechts fehlt nur noch die Akkuweiche und der Drehzahlregler.
Die Akkus selbst werde ich erst zum Schluss einbauen, wenn ich den
Schwerpunkt auswiegen kann.
|
 |
 |
Als
Empfänger wird in meiner Bo 105 ein PCM- Doppel-Superhet arbeiten. Das
ist mein erster PCM-Empfänger.
Bei
der oft geführten Diskussion "PPM oder PCM" war für mich
immer das Problem, dass bei PCM Fehler herausgefiltert werden und somit
nicht immer sofort erkannt werden. Da es jetzt aber auch Akkukontroller
mit integrierter Fehlermessung für PCM gibt, werde ich mich jetzt auch
mal in die PCM-Welt wagen.
|
|
Die
Hecksteuerung übernimmt bei mir das schnelle Analogservo C4855 zusammen
mit dem 3D-Gyro. Damit habe ich in meinem Raptor gute Erfahrungen
gemacht.
Ich
hoffe nur, dass der Heading-Hold-Modus meine Heckantriebswelle nicht allzu sehr
herausfordert. Ich werde vorsichtshalber die Empfindlichkeit erstmal
nicht so hoch einstellen. Da ich ja gerade bezüglich Konfiguration und
Einstellung auch noch ein Anfänger bin, werde ich da wohl besser etwas vorsichtiger
sein.
|
 |
 |
Die
120° Taumelscheibenanlenkung wird mit drei C4421-Servos realisiert. Das
ist für meine MC16/20 Fernbedienung auch noch kein Problem, solange ich
den Original 2-Blatt-Rotorkopf verwende.
Mein
nächstes Ziel (oder besser Wunsch) wäre ein 4-Blatt-Kopf, das ich aber
wegen der benötigten Taumelscheibenverdrehung nur zusammen mit einer
neuen Fernbedienung erreichen kann.
Als
Gas-Servo verwende ich ein C4041.
|
|
Eigentlich
braucht man nur einen Drehzahlregler, wenn man(n) zu faul ist eine
gescheite Gaskurve in den Sender zu programmieren. Da ich das bei meinem
Raptor mit dem anfangs etwas falsch eingestellten
ThunderTiger-Motor und der 3-Punkt-Kurve der MC16/20 nicht geschafft
hatte,
kaufte
ich mir damals den GV-1 und bin seitdem "etwas" verwöhnt
bezüglich der "konstanten" Rotorkopfdrehzahl.
Da
der GV-1 nicht gerade ein Schnäppchen ist, habe ich mich für den mit
dem GRAUPNER mc-heli-control baugleichen mcr-servo von Schulze
entschieden.
|
 |
 |
Für
die drei Sensormagnete ist in der Uni-Expert-Mechanik die Befestigung
auch schon vorgegeben. Alle drei Magnete müssen mit derselben
Polarisation nach oben bzw. unten eingeklebt werden.
Mit
dem Sensor am mcr-servo kann man dies zuvor ausprobieren und die Magnete
und den Sensor auf einer Seite markieren.
|
|
Auch
für den Sensor gibt es an der Mechanik Befestigungspunkte. Entweder
links oder rechts im unteren Bereich der Mechanik. Ich habe mich für
die linke Seite entschieden, da auf der Rechten der Empfänger seinen
Platz finden soll und die Sensor-Kabel mindesten 3cm von Empfänger und
Antenne entfernt sein sollten.
|
 |
 |
 |
 |
Den
Sensor habe ich mit der Heißklebepistole eingeklebt und mit dem
mitgelieferten Schrumpfschlauch noch mal gesichert.
|
|
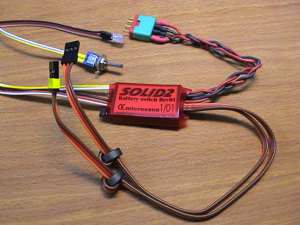
Die
doppelte Spannungsversorgung wird mit dem SOLID2 realisiert. Über den
MPX-Stecker werden die beiden Empfängerakkus (gleiche Akkutypen)
angeschlossen. Über zwei Stecker bekommt der Empfänger die
Spannung geliefert. Der markierte Stecker kann dann zusätzlich in einen
freien Kanal zur Fehlerüberwachung verwendet werden.
Der
Schalter aktiviert die Spannungsversorgung, wenn er im Zustand offen ist.
Wird
der Schalter geschlossen, so wird nach einer Zeit
|
 |
 |
von
ca. 5 Sekunden erst die Spannungsversorgung abgeschaltet.
Für
die Spannungs- und Fehlerüberwachung gibt es dann eine LED und einen
Piepser.
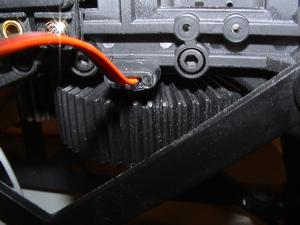
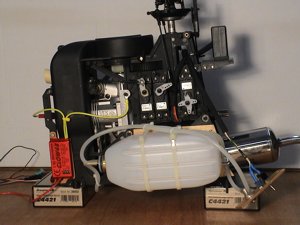
Hier
kann man den GLOW4B seitlich am Kühlluftschacht sehen. Er sollte laut
Hersteller nicht in der Nähe des Empfängers sein.
Ebenfalls
gut zu erkennen ist meine Ansaugverlängerung (momentan noch mit
Staubverschluss). So soll ein "spucken" des Vergasers in den
Kühlluftschacht - und somit über den Kühlkopf des Motors - verhindert
werden.
Inwieweit
dies so funktioniert, werde ich noch testen müssen.
|
|
Der GLOW4B ist eine Glühelektronik für den Motor.
Die Stromversorgung wird über den Gaskanalanschluss des GLOW4Bs
realisiert. Man spart somit den zusätzlichen Glühakku, der in der
Regel aus zwei Zellen besteht.
Der leicht erhöhten Stromverbrauch wird mit der Doppelstromversorgung
(2x 1700 mAh) sicherlich kein Problem.
|
 |
 |
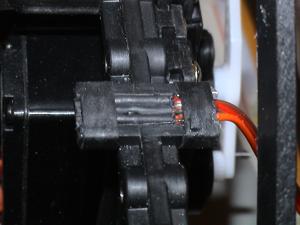
Die Kabelverbindung zum GLOW4B sollte allerdings wegen des erhöhten
Stromes so kurz wie möglich sein
Da nun aber noch der Drehzahlregler "dazwischen" kommt und ein
Y-Kabel für die Verteilung zum Gasservo und der Glühelektronik
benötigt wird, kommt doch schon einiges an Kabeln zusammen.
Als Lösung habe ich das Y-Kabel selbst direkt am Drehzahlregler
angelötet.
|
|
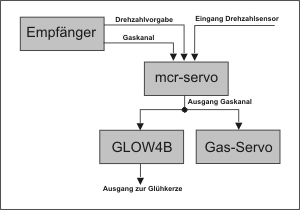
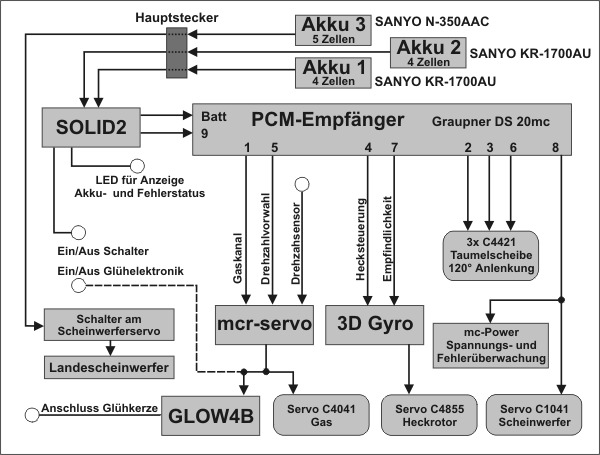
Unten das Schaltbild der gesamten Elektronik im Hubschrauber. Aus dem
Bild ist auch die Kanalbelegung zu erkennen.
Der zweite Anschluss des SOLID2 zum Empfänger ist an Kanal 9
angeschlossen. Dieser Kanal ist, solange ich noch mit der Fernbedienung
mc-16/20 arbeite, ohne Signal. Da ich für die Fehlerüberwachung mit
dem SOLID2 keinen freien Kanal mehr habe ist diese Funktion nicht aktiv.
Der GLOW4B geht nach dem Einschalten der Spannungsversorgung in einen
Lernmodus. Beim Einschalten muss der Gashebel im Leerlauf sein. Danach
muss einmal auf Vollgas und wieder auf Standgas geschaltet werden.
Daraufhin ist der GLOW4B aktiviert und glüht die ersten 30 Sekunden mit
erhöhtem Strom zum Starten des Motors. Um diese Funktion auch
unterbinden zu können, habe ich einen Schalter eingebaut. Um das
Stromproblem mit einer zu langen Kabelverbindung zu umgehen, habe ich zu
dem abgesetzten Schalter nur die Datenleitung (bei GRAUPNER die orange
Leitung) gelegt. Ist diese Leitung "abgeschaltet" tut der
GLOW4B auch nichts. So kann ich nun in Ruhe meinen Elektronik
einschalten ohne in den Lernmodus zu gelangen, und ohne den Akku auch
gleich mit dem Glühstrom zu belasten.
Die Spannungs- und Fehlerüberwachung mc-Power benötigt keinen freien
Kanal. Daher habe ich sie zusammen mit dem Landescheinwerfer an Kanal 8
angeschlossen. So bekomme ich noch mal zusätzlich eine Spannungsanzeige
(genauer als beim SOLID2) und nebenbei noch eine Fehlerüberwachung
(inwieweit das bei PCM funktioniert muss ich erst noch testen ...)
|
|
|
 |
Belegung
bei meiner mc16/20:
Kanal 1-4 Pitch & Gas / Roll / Nick / Heck
Kanal 5 Drehzahvorgabe ( AUS / rpm1 / rpm2 )
Kanal 6 Pitchtrimmung ( deaktiviert )
Kanal 7 Kreisel ( Normal- / HH -Modus )
Kanal 8 Landescheinwerfer
S0/1 Exponential
Nick/Roll
S3
Autorotationsschalter
S4/5
Flugphasenschalter ( 0 / 1 / 2 )
S7
ohne Funktion
|
zum Vergrößern anklicken
|
zum Vergrößern anklicken
|
|
Die
Servokabel habe ich in einen Gewebeschlauch eingepackt und an der Mechanik
entlanggeführt. Das Kabel des Drehzahlsensors verläuft oberhalb des
Motors. So kommt es weniger mit dem restlichen Kabelbaum in
Kontakt.
|
|
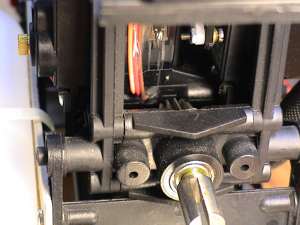
Das
Heckrotorservo muss anders als bei anderen UNI-Mechanik Anwendungen mit
dem Kabelabgang nach unten eingebaut werden.
Hier
wird es richtig eng, da direkt hinter dem Servo das Taumelscheibenservo
arbeitet und unten das Getriebe für den Heckrotor läuft.
|
 |
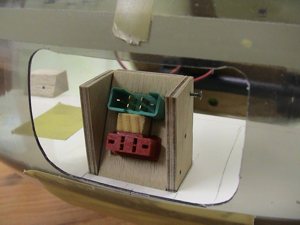 |
Hinter der vorderen Klappe befinden sich die Batteriestecker.
An der roten Buchse sind die beiden Empfängerakkus für die
Doppelstromversorgung und der Akku für den Landescheinwerfer direkt
angelötet.
Der grüne Stecker ist die Verbindung zum Empfänger über den SOLID 2
und zum
Landescheinwerfer (über den Microschalter).
|
|
Zum Fliegen wird eine Brücke zwischen Stecker und Buchse eingesteckt.
Zum Laden der einzelnen Akkus werde ich ein Ladekabel mit Steckern für
jeden einzelnen Akku verwenden.
Zum Laden auf dem Fluggelände wollte ich eine Ladebuchse an der
hinteren Wartungsklappe anbringen, wo sich auch die Betankung und der
EIN/AUS-Schalter befinden. Um unnötig lange Kabel zu vermeiden, habe
ich das nun doch nicht realisiert.
|
 |
|
Der
Stromverbrauch bei den ersten Testflügen lag bei 15 Minuten Flugzeit
unter 400 mAh. Somit sollte die Kapazität der 2x 1700 mAh
kein Problem werden. Und die vordere Klappe muss auf dem Fluggelände
nicht geöffnet werden.
Hier rechts unten im Bild das Panel hinter der linken hinteren
Wartungsklappe:
links: Tankanschluss / Mitte: Hauptschalter vom SOLID2
/ rechts: Schalter zum Aktivieren des GLOW4b
|
|
Das Tankventil hier im Bild ist in der Leitung zwischen Tank und
Vergaser eingebunden. Bei den ersten Flügen hatte ich damit Probleme,
da das Ventil nicht richtig abgedichtet hatte.
Jetzt habe ich die Verbindung Tank-Vergaser direkt angeschlossen (eine
Fehlerquelle weniger) und betanke den Hubschrauber über einen
zusätzlichen Tankanschluss. Beim Betanken ist nun darauf zu achten, dass der Vergaser
zu ist.
|
 |